成果简介:
本产品是一款基于ROS系统开发的智能型授粉机器人,主要用于植物工厂等室内环境中各种果蔬花朵的自动化授粉。该机器人能够准确检测出目标花朵及其空间坐标,并自主移动到目标位置,通过机械臂和末端执行器对花朵逐个接触授粉。该机器人具有全向、大范围自主移动能力,无需在地面铺设导轨或引导地标,灵活机动,授粉精准,花粉用量少,利用率高,可避免花粉浪费现象,授粉过程对花朵无损伤。该产品还支持对其进行二次技术开发,用于其他作业。
主要技术指标:
(1)可进行环境巡检,并具有避障功能;
(2)无轨式底盘,具有全向、大范围自主移动能力,定位精度小于5cm;
(3)可一次性检测出视野内所有花朵,并对拟授粉的花朵进行连续授粉作业;
(4)支持二次技术开发,用于执行其他作业任务。
应用领域:智慧农业及其他领域。
市场前景:用于植物工厂等室内环境下的各种花朵授粉,也可通过修改部分硬件和软件,完成其他作业任务。
拟转化的方式:可直接供货,或根据作业任务需求进行定制(需提前预订)。
相关图片:
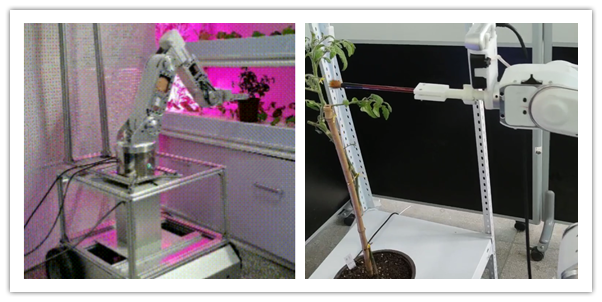
授粉机器人作业演示




