依托于国家自然科学基金青年项目“面向定位的激光雷达与视觉融合数据通用特征提取方法与评估”,近期,中科院合肥物质科学研究院智能所机器人传感器与人机交互研究室李阳铭等人提出了新的数据关联方法,大大降低了计算复杂度。相关研究成果被IEEE Transactions on Industrial Informatics (TII)接收,第一作者为李阳铭副研究员。
数据关联是决策论中的核心问题之一。在移动机器人领域,数据关联主要被用来确定不同时间获取的传感器观测之间的对应关系。数据关联的计算复杂度在本质上是随数据集的尺度指数增长的,传统的数据关联方法无法在保证关联准确性的同时满足计算复杂度的要求。机器人传感器与人机交互研究室的李阳铭等人利用后验概率的准确性和传感器观测之间的条件独立性提出了一种新颖的基于后验概率的数据关联方法,这种数据关联方法不但将计算复杂度从T(n3)降到了T(n2),其关联准确度还大大高于传统数据关联方法。
除此之外,在本项目研究中机器人传感器与人机交互研究室还利用反馈神经网络解决了激光雷达控制电机的非线性控制问题,研究结果发表在Neural Networks and Learning Systems, IEEE Transactions on( vol.24, no.2, pp.301-309)上。本青年基金项目一年多来已发表学术论文11篇(其中SCI 8篇,EI 1 篇),基本解决了项目任务书中所涉及的主要研究问题。
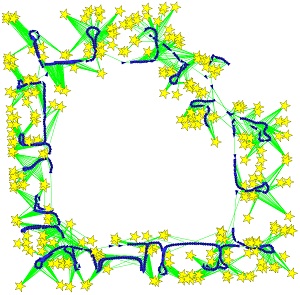
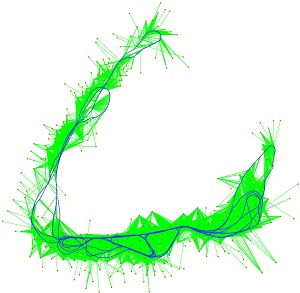
利用基于后验概率的数据关联方法解决经典Intel Research Center和Victoria Park数据集中的数据关联问题




