科学岛新闻网
科学岛新闻网
科学岛新闻网
科学岛新闻网

日前,中科院合肥研究院等离子体所装置主机工程研究室遥操作课题组在轻量化柔性组件机械臂的动态特性分析和运动控制研究工作中取得了一定进展。研究成果发表在中科院一区TOP期刊Applied Mathematical Modelling上。
由轻量化材料组成的柔性机械臂具有节能、轻质、体积小、工作空间大、运输方便、制造成本低等诸多优点,其在聚变装置维护领域具有很好应用前景。但由于系统组件的刚度较低,柔性机械臂在运动过程中或受到外界干扰时,不可避免的会出现弹性振动,进而降低控制精度和系统稳定性,严重时还会造成疲劳破坏,降低工作寿命,因此针对轻量化柔性组件机械臂的动态特性分析和运动控制方面一直也是科研人员的研究重点和难点。
鉴于上述问题,科研人员针对具有欠驱动特性的柔性机械臂在三维空间中的振动抑制与轨迹跟踪问题,提出了一种基于动力学模型的前馈轨迹规划和基于扩展状态观测器的混合控制策略,同时通过浮动坐标法、模态综合以及零空间投影等,解决了系统在三维空间中的动力学建模和求解问题。该研究工作中所提出的建模方法可以进一步拓展应用到多组件机械臂系统的动态特性分析,并且所提出的控制策略能够在存在模型不确定性或外部干扰的情况下,较好的实现弹性振动抑制和轨迹跟踪控制;同时该研究中提出的方法易于实现,减少了系统中传感器/储能器等设备的使用,有效降低了经济成本,并为后续的柔性维护机械臂的研究和开发提供了理论依据。
上述研究工作得到了聚变堆主机关键系统综合研究设施(CRAFT)项目的资助。
论文链接:https://doi.org/10.1016/j.apm.2022.05.030
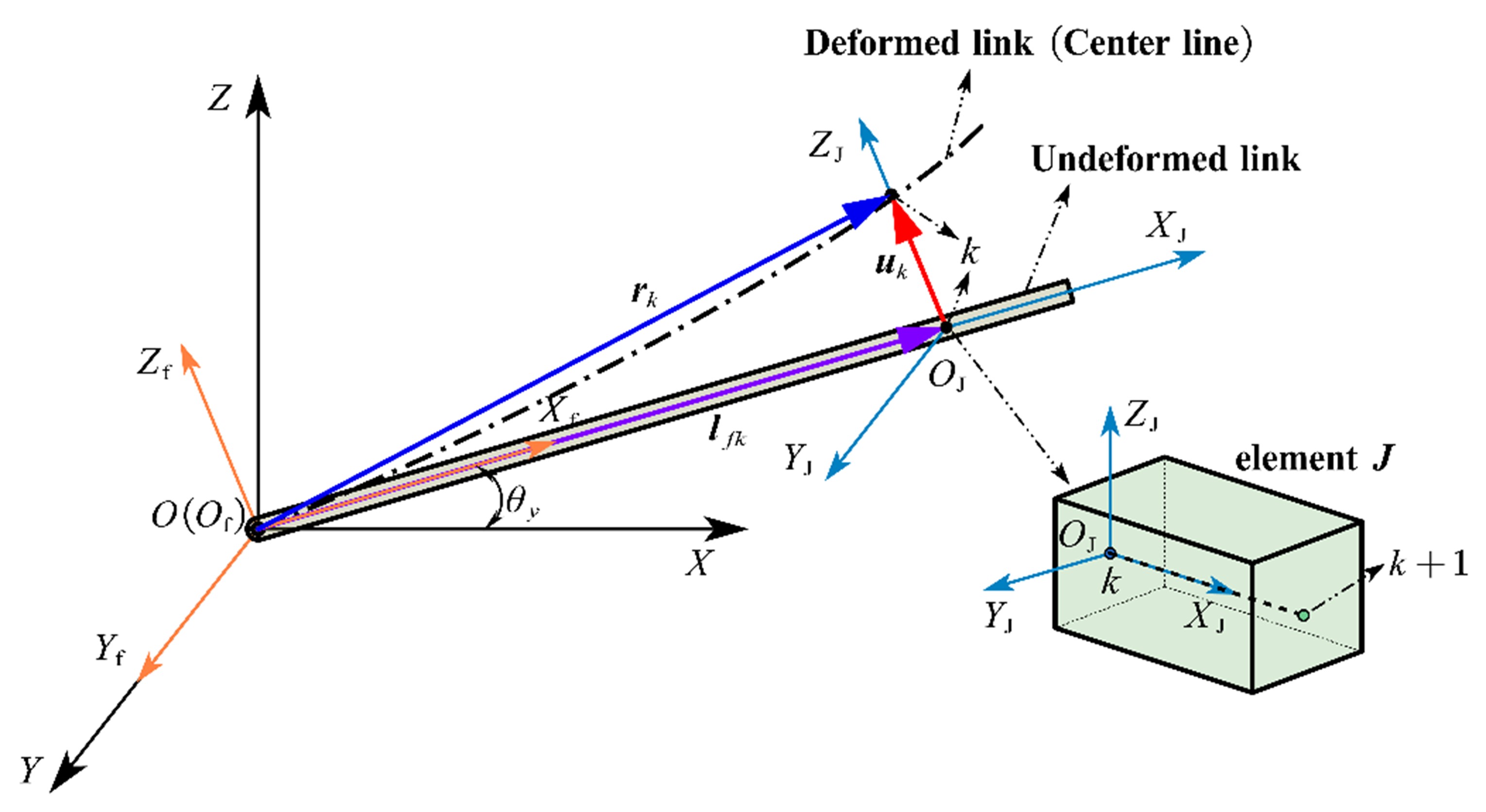
图:机械臂柔性连杆建模



 科学岛报
科学岛报
 科学岛视讯
科学岛视讯